Related to: Applications
개요
SSD(Single Shot Multibox Detector)는 One-stage Detector의 일종으로, YOLO v1의 문제점을 개선한 객체 탐지 모델입니다.
핵심 개념
YOLO v1의 문제점
Yolo v1의 문제점은 입력 이미지를 7x7 크기의 그리드로 나누고, 각 그리드 별로 Bounding Box Prediction을 진행하기 때문에 그리드 크기보다 작은 물체를 잡아내지 못하는 문제가 있었습니다.
그리고 신경망을 모두 통과하면서 컨볼루션과 풀링을 거쳐 coarse한 정보만 남은 마지막 단 피쳐맵만 사용하기 때문에 정확도가 하락하는 한계가 있었습니다.
SSD의 해결 방법
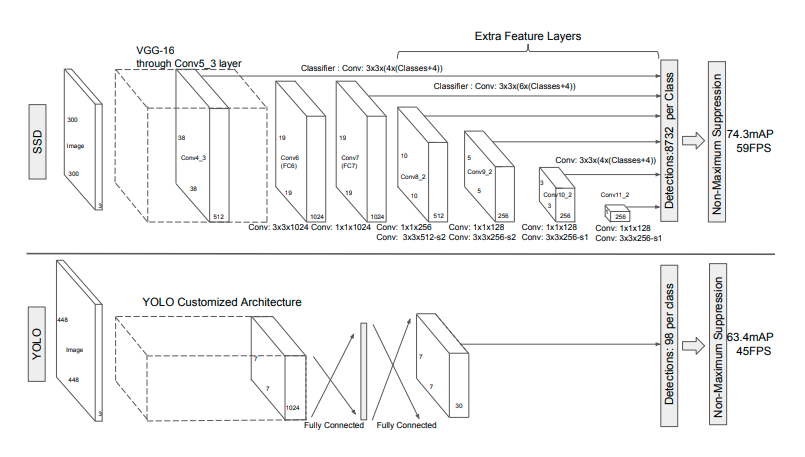
SSD는 이를 해결하고자 앞단 CNN Feature Map을 끌어와 사용하여 Detail을 잡아내고 Faster RCNN의 Anchor 개념을 가져와서 다양한 형태의 Object들도 감지하려고 시도했습니다.
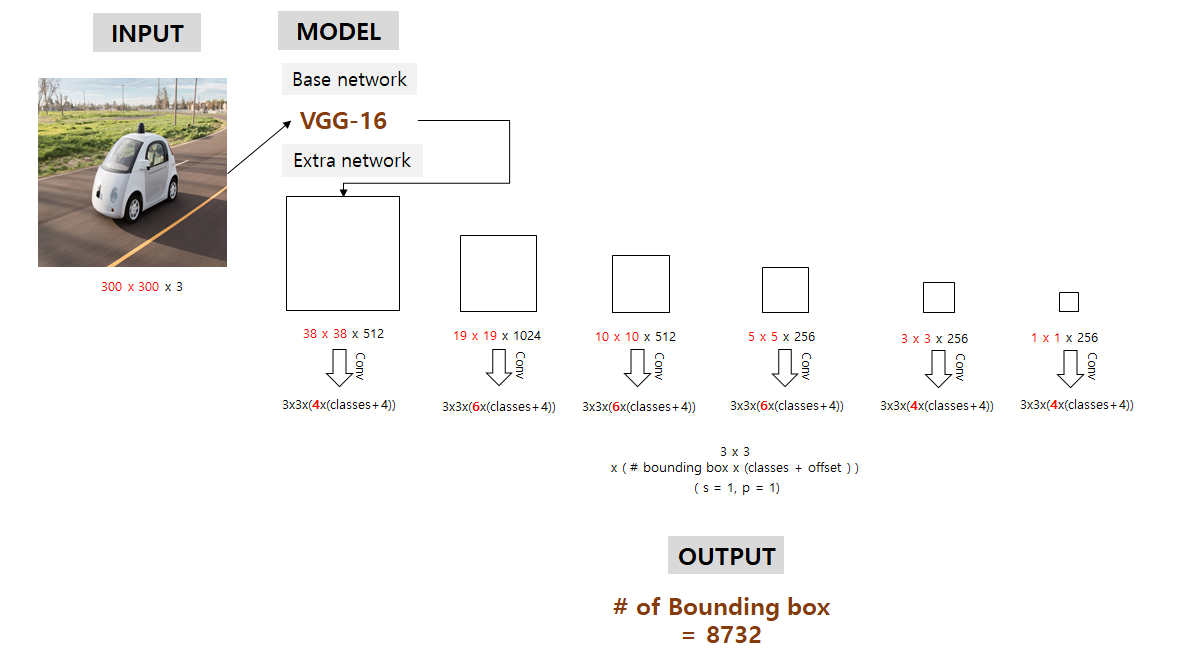
yolo v1은 7x7 grid로 2개의 Bounding Box를 예측했습니다. 하지만 SSD의 Feature Map을 보면 매우 다양한 dimension으로 이루어져 있는 것을 알 수 있습니다.
- Feature Map 1 : 38 x 38 x 512 → 38 x 38 x B개의 Bounding Box 예측
- Feature Map 2 : 19 x 19 x 1024 → 19 x 19 x B개의 Bounding Box 예측
- Feature Map 3 : 10 x 10 x 512 → 10 x 10 x B개의 Bounding Box 예측
- Feature Map 4 : 5 x 5 x 256 → 5 x 5 x B개의 Bounding Box 예측
- Feature Map 5 : 3 x 3 x 256 → 3 x 3 x B개의 Bounding Box 예측
- Feature Map 6 : 1 x 1 x 256 → 1 x 1 x B개의 Bounding Box 예측
또한 yolo v1에서는 Bounding Box와 별개로 Grid의 Class를 예측했다면, SSD는 Bonding Box 별로 Class를 예측한다는 것을 Conv Filter Size 공식을 보면 알 수 있습니다.
Conv Filter Size = 3 x 3 x (B x (C + offset))
- stride = 1, padding = 1
- B : Bounding Box 개수
- C : Class 개수
- offset : Bounding Box의 center x, center y, width, height
Loss
-
Loss Function

-
Localization Loss
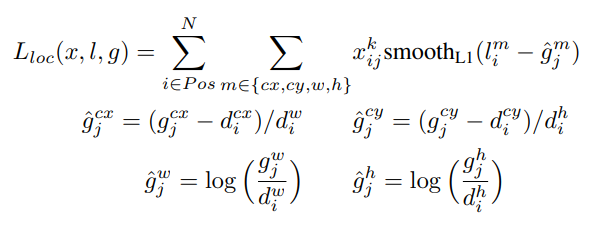
-
Confidence Loss

관련 개념
- Yolo v1(You Only Look Once) — SSD가 개선하고자 한 One-stage Detector
- FPN(Feature Pyramid Network) — 멀티스케일 Feature Map을 체계화한 구조
- RetinaNet — SSD와 함께 대표적인 One-stage Detector
- NMS(Non-Maximum Suppression) — SSD 후처리에 사용되는 알고리즘
- Two-stage detector vs One-stage detector — SSD가 속하는 탐지 구조 비교
- RPN(Region Proposal Network) — Two-stage Detector에서 사용하는 영역 제안 방식
참조
SSD: Single Shot MultiBox Detector
We present a method for detecting objects in images using a single deep neural network. https://arxiv.org/abs/1512.02325