Related to: Applications
개요
Feature Pyramid Network(FPN)은 Object Detection에서 Semantic 정보를 고유한 비율로 추출할 수 있도록 하는 기술입니다.
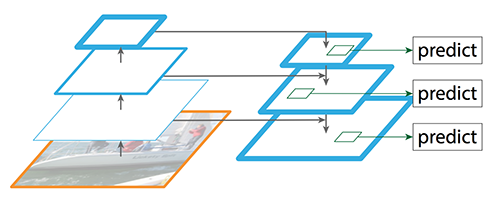
Pyramid 구조를 통해 Low Level에서 High Level로 정보를 전달하며, Top-Down 방식과 Bottom-Up 방식을 사용합니다.
또한, Stage Mapping을 통해 ROI의 w와 h 값으로 Stage를 추정하여 각 Stage에서 Feature map을 추출합니다.
- Low Level은 Semantic한 정보가 없기 때문에 Pyramid 구조를 사용하여 High Level에서 Low Level로 Semantic 정보를 전달
- Low level = Early stage = bottom
- High level = Late Stage = Top
핵심 개념
Pipeline
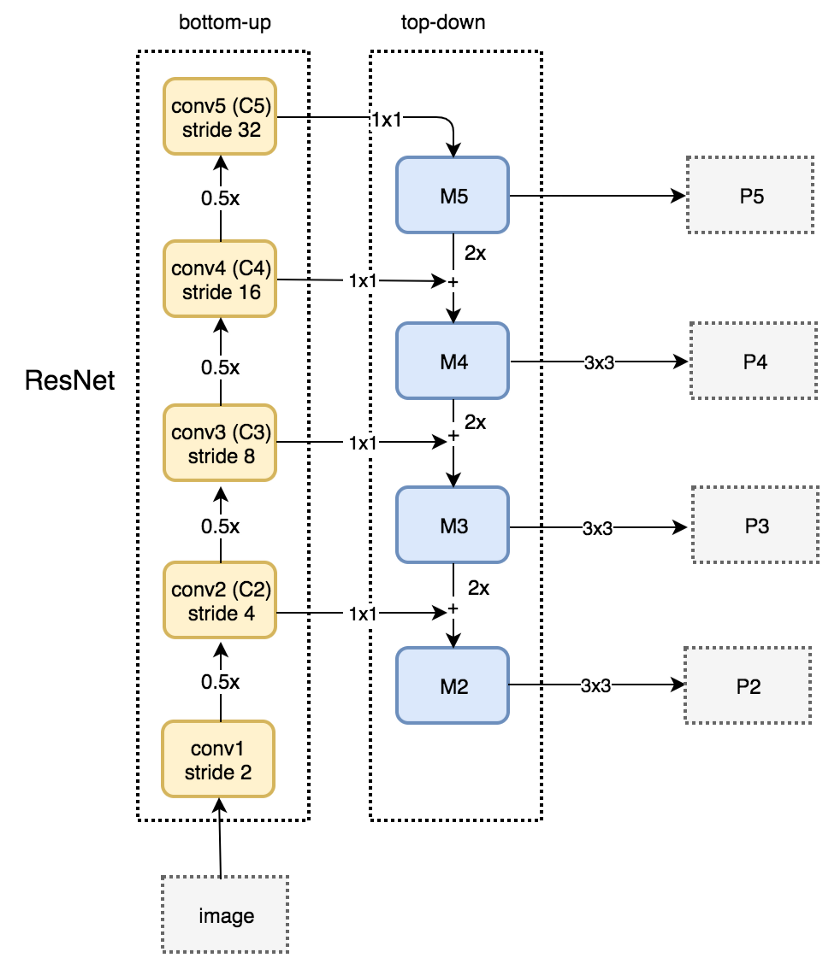
- Bottom-Up
- image ~~ High Level까지 feature 전달됨, 일반적인 CNN Backbone 통과 과정을 의미
- Top-Down
- High Level ~~ Low Level까지 feature 전달
- Feature Map의 Dimension이 맞지 않음
- Top-Down Path : Up Convolution 진행(h, w 피팅)
- 기존 level Path : 1x1 Convolution 진행(c 피팅)
Stage Mapping
Faster R-CNN 구조에 FPN을 적용하려면 Region Proposal을 어떤 scale의 feature map과 매칭시킬지 결정해야 합니다.
Fast R-CNN은 single-scale feature map만을 사용한 반면, FPN을 적용한 Faster R-CNN은 multi-scale feature map을 사용하기 때문입니다.
저자는 아래 공식을 사용하여 k번째 feature map과 매칭시킵니다.
관련 개념
- PANet(Path Aggregation Network) — FPN의 단점을 보완한 네트워크
- BiFPN(Neck, EfficientDet) — FPN을 개선한 양방향 Feature Pyramid
- DetectroRS — FPN에 Recursive Feedback을 추가한 모델
- Neck — FPN이 속하는 객체 탐지 구성요소
- SSD(Single Shot Multibox Detector) — 멀티스케일 Feature Map을 사용하는 Detector
- RPN(Region Proposal Network) — FPN과 함께 사용되는 영역 제안 네트워크
참조
https://arxiv.org/abs/1612.03144 https://jonathan-hui.medium.com/understanding-feature-pyramid-networks-for-object-detection-fpn-45b227b9106c